隣接リスト表現のためのダイクストラのアルゴリズム
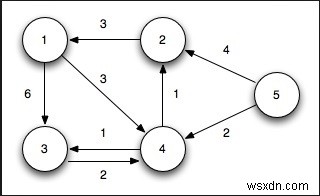
隣接リスト表現を含む特定のグラフG(V、E)があり、ソース頂点も提供されます。ソース頂点からグラフGの他の頂点までの最短最短経路を見つけるダイクストラのアルゴリズム。
この問題を解決するために、2つのリストを使用します。 1つは最短経路ツリーと見なされている頂点を格納することであり、もう1つはまだ考慮されていない頂点を保持することです。アルゴリズムの各フェーズで、考慮されていない頂点が見つかり、ソースからの距離が最小になります。
別のリストは、先行ノードを保持するために使用されます。先行ノードを使用して、送信元と宛先からのパスを見つけることができます。
グラフは隣接リストを使用して表されるため、ダイクストラの最短パスアルゴリズムの複雑さはO(E log V)です。 。ここで、Eはエッジの数、Vは頂点の数です。
入力と出力
Input: The adjacency list of the graph with the cost of each edge.Output: 0 to 1, Cost: 3 Previous: 0 0 to 2, Cost: 5 Previous: 1 0 to 3, Cost: 4 Previous: 1 0 to 4, Cost: 6 Previous: 3 0 to 5, Cost: 7 Previous: 2 0 to 6, Cost: 7 Previous: 4
アルゴリズム
dijkstraShortestPath(g : Graph, dist, prev, start : node)
入力- グラフg、距離を格納するdistリスト、先行ノードのprevリスト、および開始頂点。
出力- 開始から他のすべての頂点までの最短経路。
Begin for all vertices u in (V - start) do dist[u] := ∞ prev[u] := φ done set dist[start] = 0 and prev[start] := φ for all node u in V do insert u into queue ‘Q’. done while Q is not empty do u := minimum element from Queue delete u from Q insert u into set S for each node v adjacent with node u do if dist[u]+cost(v) < dist[v] then dist[v] := dist[u]+cost(v) prev[v] := u done done End
例
#include<iostream>
#include<set>
#include<list>
#include<algorithm>
using namespace std;
typedef struct nodes {
int dest;
int cost;
}node;
class Graph {
int n;
list<node> *adjList;
private:
void showList(int src, list<node> lt) {
list<node> :: iterator i;
node tempNode;
for(i = lt.begin(); i != lt.end(); i++) {
tempNode = *i;
cout << "(" << src << ")---("<<tempNode.dest << "|"<<tempNode.cost<<") ";
}
cout << endl;
}
public:
Graph() {
n = 0;
}
Graph(int nodeCount) {
n = nodeCount;
adjList = new list<node>[n];
}
void addEdge(int source, int dest, int cost) {
node newNode;
newNode.dest = dest;
newNode.cost = cost;
adjList[source].push_back(newNode);
}
void displayEdges() {
for(int i = 0; i<n; i++) {
list<node> tempList = adjList[i];
showList(i, tempList);
}
}
friend void dijkstra(Graph g, int *dist, int *prev, int start);
};
void dijkstra(Graph g, int *dist, int *prev, int start) {
int n = g.n;
for(int u = 0; u<n; u++) {
dist[u] = 9999; //set as infinity
prev[u] = -1; //undefined previous
}
dist[start] = 0; //distance of start is 0
set<int> S; //create empty set S
list<int> Q;
for(int u = 0; u<n; u++) {
Q.push_back(u); //add each node into queue
}
while(!Q.empty()) {
list<int> :: iterator i;
i = min_element(Q.begin(), Q.end());
int u = *i; //the minimum element from queue
Q.remove(u);
S.insert(u); //add u in the set
list<node> :: iterator it;
for(it = g.adjList[u].begin(); it != g.adjList[u].end();it++) {
if((dist[u]+(it->cost)) < dist[it->dest]) { //relax (u,v)
dist[it->dest] = (dist[u]+(it->cost));
prev[it->dest] = u;
}
}
}
}
main() {
int n = 7;
Graph g(n);
int dist[n], prev[n];
int start = 0;
g.addEdge(0, 1, 3);
g.addEdge(0, 2, 6);
g.addEdge(1, 0, 3);
g.addEdge(1, 2, 2);
g.addEdge(1, 3, 1);
g.addEdge(2, 1, 6);
g.addEdge(2, 1, 2);
g.addEdge(2, 3, 1);
g.addEdge(2, 4, 4);
g.addEdge(2, 5, 2);
g.addEdge(3, 1, 1);
g.addEdge(3, 2, 1);
g.addEdge(3, 4, 2);
g.addEdge(3, 6, 4);
g.addEdge(4, 2, 4);
g.addEdge(4, 3, 2);
g.addEdge(4, 5, 2);
g.addEdge(4, 6, 1);
g.addEdge(5, 2, 2);
g.addEdge(5, 4, 2);
g.addEdge(5, 6, 1);
g.addEdge(6, 3, 4);
g.addEdge(6, 4, 1);
g.addEdge(6, 5, 1);
dijkstra(g, dist, prev, start);
for(int i = 0; i<n; i++)
if(i != start)
cout<<start<<" to "<<i<<", Cost: "<<dist[i]<<" Previous: "<<prev[i]<<endl;
} 出力
0 to 1, Cost: 3 Previous: 0 0 to 2, Cost: 5 Previous: 1 0 to 3, Cost: 4 Previous: 1 0 to 4, Cost: 6 Previous: 3 0 to 5, Cost: 7 Previous: 2 0 to 6, Cost: 7 Previous: 4
-
分散共有メモリを実装するためのアルゴリズム
共有メモリ 複数のプログラムからアクセスできるメモリブロックです。共有メモリの概念は、通信の方法を提供し、冗長性の少ないメモリ管理を提供するために使用されます。 分散共有メモリ DSMと略されます 分散システムでの共有メモリの概念の実装です。 DSMシステムは、システム内のローカルの物理共有メモリを奪われた疎結合システムに共有メモリモデルを実装します。このタイプのシステムでは、分散共有メモリは、すべてのシステム(ノードとも呼ばれます)がアクセスできる仮想メモリ空間を提供します。 )分散階層の。 DSMの実装中に留意すべきいくつかの一般的な課題- 共有メモリにリモートで保存されて
-
データ構造の隣接リスト
グラフは非線形のデータ構造です。これは、ノードを使用したデータと、エッジを使用したそれらの関係を表します。グラフGには2つのセクションがあります。頂点とエッジ。頂点はセットVを使用して表され、エッジはセットEとして表されます。したがって、グラフ表記はG(V、E)です。アイデアを得るための1つの例を見てみましょう。 このグラフには、5つの頂点と5つのエッジがあります。エッジが方向付けられます。例として、頂点BとDを接続するエッジを選択した場合、ソース頂点はBで、デスティネーションはDです。したがって、BをDに移動することはできますが、DからBに移動することはできません。 グラフは非線形